saga::task_container Class Reference
Handles a large number of asynchronous operations. More...
#include <task_container.hpp>
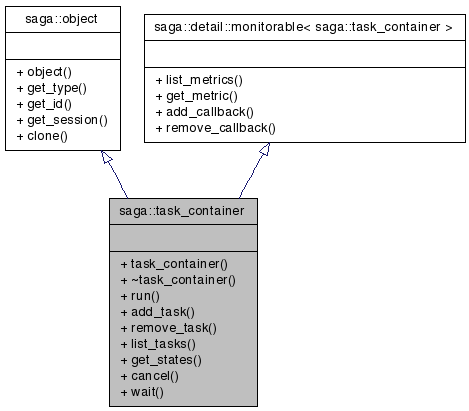
Inheritance diagram for saga::task_container:
Public Types | |
| enum | wait_mode { All = 1, Any = 2 } |
| The wait mode enum specifies the condition on which a wait() operation on a saga::task container returns. More... | |
Public Member Functions | |
| task_container (void) | |
| Creates a task_container. | |
| ~task_container (void) | |
| Destroys a task_container. | |
| void | run () |
| Start all asynchronous operations in the container. | |
| void | add_task (task t) |
| Adds a task to a task_container. | |
| void | remove_task (task t) |
| Removes a task from a task_container. | |
| std::vector< task > | list_tasks (void) const |
| Lists the tasks in the task_container. | |
| std::vector< task_base::state > | get_states (void) const |
| Gets the states of all tasks in the task_container. | |
| void | cancel (void) |
| Cancels all the asynchronous operations in the container. | |
| std::vector< task > | wait (wait_mode mode=All, float timeout=-1.0) |
| Wait for one or more of the tasks to finish. | |
Detailed Description
Handles a large number of asynchronous operations.Managing a large number of tasks can be tedious. The task_container class is designed to help in these situations, and to effectively handle a large number of asynchronous operations.
Member Enumeration Documentation
The wait mode enum specifies the condition on which a wait() operation on a saga::task container returns.
Constructor & Destructor Documentation
| saga::task_container::task_container | ( | void | ) |
Creates a task_container.
| saga::task_container::~task_container | ( | void | ) |
Destroys a task_container.
Member Function Documentation
| void saga::task_container::run | ( | void | ) |
Start all asynchronous operations in the container.
| void saga::task_container::add_task | ( | task | t | ) |
Adds a task to a task_container.
- Parameters:
-
task Task to add to the task_container.
- Returns:
- Cookie identifying the added task.
| void saga::task_container::remove_task | ( | task | t | ) |
| std::vector< task > saga::task_container::list_tasks | ( | void | ) | const |
| std::vector< task_base::state > saga::task_container::get_states | ( | void | ) | const |
Gets the states of all tasks in the task_container.
- Returns:
- Array of states for tasks in task_container.
| void saga::task_container::cancel | ( | void | ) |
Cancels all the asynchronous operations in the container.
- Parameters:
-
timeout Time for freeing resources.
The documentation for this class was generated from the following files: